
Parkeringshanteringssystem kan vara på väg mot 3D
Städer världen över experimenterar med smartare sätt att hantera parkering. Vissa använder parkeringsdata för att dynamiskt justera prissättningen, och därigenom säkerställa tillräcklig platstillgänglighet; andra använder vägkantsparkeringssystem utrustade med marksensorer, och integrerar dem i bredare smarta stadsplattformar; ytterligare andra använder nätverksanslutna sensorer för att övervaka tusentals enskilda parkeringsplatser. Dessa initiativ delar ett tydligt mål: att minska trafikstockningar i fordon, förbättra effektiviteten i vägparkering och göra en mer effektiv användning av begränsade stadsutrymmen.
Även om dessaparkeringshanteringssystemhar implementerats i många länder globalt, många förlitar sig fortfarande på fragmenterad eller ofullständig data. Installation och storskaligt underhåll av marksensorer/slingdetektorer är kostsamma, medan kamerabaserade övervakningssystem kan vara känsliga för ljusförhållanden eller väcker integritetsproblem. När städer försöker skala upp sina smarta parkeringsinitiativ ligger utmaningen inte bara i att samla in data, utan att göra det på ett tillförlitligt, effektivt och i stor skala.
LiDAR-teknologin börjar få betydande dragkraft inom sektorn för parkeringshanteringssystem. LiDAR – en akronym för Light Detection and Ranging – använder laserpulser för att exakt fånga tredimensionell information om den fysiska miljön, vilket ger en robust databas för modern parkeringshantering. Från att övervaka beläggning av parkeringsplatser till att klassificera fordonstyper, LiDAR-baserade system ger operatörerna möjlighet att få insikter i parkeringsdynamiken med en granularitetsnivå som traditionella lösningar har svårt att matcha.

Varför LiDAR är väl lämpad för smarta parkeringshanteringssystem?
I kärnan fungerar LiDAR genom att använda laserpulser för att mäta avstånd. Dessa mätningar genererar en tät, tredimensionell representation av miljön – känd som ett "punktmoln". Till skillnad från kamerabilder förblir dessa data opåverkade av omgivande ljusförhållanden; istället beskriver den den omgivande miljöns geometri med hög precision.
Denna 3D-data erbjuder många fördelar för parkeringsapplikationer.
För det första upprätthåller LiDAR konsekvent prestanda över ständigt föränderliga miljöförhållanden. Faktorer som vanligtvis äventyrar kamerasystem – som mörker, bländning eller skuggor – har minimal inverkan på laserbaserade mätningar. Detta gör LiDAR särskilt väl lämpad för utomhusparkeringar, garage och vägkanter där ljusförhållandena fluktuerar under dagen.
För det andra fångar LiDAR fysiska strukturer snarare än visuella utseenden. Fordon, trottoarkanter, hinder och fotgängare upptäcks alla som tredimensionella objekt. Detta gör det möjligt för algoritmer att på ett tillförlitligt sätt identifiera och spåra objekt utan att först behöva analysera tvådimensionella bilder som är benägna att misstolkas.
Slutligen stöder LiDAR-data integritetsmedveten övervakning. Eftersom den här tekniken mäter avstånd snarare än visuella detaljer, fångar den inte identifierbara egenskaper – som mänskliga ansikten eller registreringsskyltar – om den inte kompletteras med ytterligare sensorer. För kommuner och operatörer som står inför strikta dataskyddskrav kan detta vara en betydande fördel. Sammantaget gör dessa egenskaper LiDAR till en kraftfull grund för datadrivna parkeringssystem.

Beläggningsövervakning: LiDAR i praktiska applikationer för parkeringshanteringssystem.
En av de mest direkta tillämpningarna av LiDAR i parkeringsmiljöer är övervakningen av fordonsbeläggning.
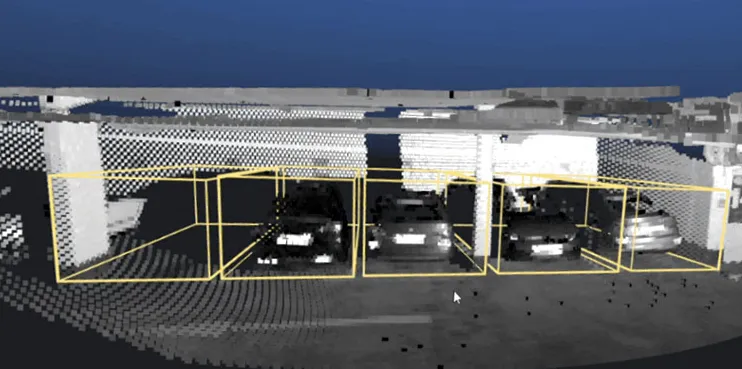
I ett typiskt installationsscenario är LiDAR-sensorer monterade på befintlig infrastruktur – såsom ljusstolpar eller byggnadsfasader – med utsikt över en parkeringsplats eller gatuområde. Sensorerna skannar kontinuerligt sin omgivning och genererar en ström av 3D-datapunkter. Programvara bearbetar dessa data i realtid för att upptäcka objekt, bestämma deras exakta platser och klassificera dem.
Parkeringsplatser kan anvisas inom systemet. När ett fordon kommer in i den övervakade zonen upptäcker sensorerna det inom punktmolnet genom att identifiera ett objekt som inte fanns tidigare. De upptäckta punkterna utlöser en förändring av parkeringsplatsens beläggningsstatus. När fordonet avgår markeras utrymmet sedan som tillgängligt igen.
På grund av den extremt höga precisionen hos LiDAR-data kan storleksgränser fastställas för objekt som upptäcks inom varje övervakningszon. Detta säkerställer att små föremål – som kundvagnar, skräp eller förbipasserande fotgängare – inte utlöser falska beläggningshändelser. En parkeringsplats markeras som upptagen endast när det detekterade objektet överskrider förinställda parametrar (t.ex. de typiska dimensionerna för ett fordon). Denna konfigurerbara filtreringsmekanism förbättrar detekteringsnoggrannheten och säkerställer tillförlitliga närvarodata även i komplexa miljöer som kännetecknas av frekventa fordonsrörelser.
Eftersom LiDAR kan fånga omfattande rumslig information kan en enda sensor ofta övervaka flera parkeringsplatser samtidigt. I strukturerade miljöer – som parkeringsplatser eller trottoarkanter med tydligt definierade gränser – kan en enda installation effektivt täcka en hel zon.
Även om det är användbart att veta om en parkeringsplats är upptagen, kan det vara ännu mer värdefullt att förstå "vad" som upptar den.
LiDAR-baseradparkeringshanteringssystemkan klassificera fordon utifrån deras storlek och form. Genom att analysera 3D-geometrin som fångas i punktmolnet kan algoritmer skilja mellan kategorier som personbilar, skåpbilar, lastbilar eller tvåhjuliga fordon.
Denna information öppnar dörren till ett stort antal praktiska tillämpningar. Operatörer kan till exempel analysera om parkeringsplatser vid trottoarkanten – som ursprungligen var avsedda för korttidsavlämning av passagerare – ofta upptas av varubilar. På samma sätt kan data om stora fordon hjälpa städer att bedöma efterfrågan på parkering inom lastzoner eller kommersiella parkeringsplatser.
Fordonsklassificeringen underlättar också en effektivare tillämpning. Om regler begränsar vissa typer av fordon från att använda specifika utrymmen, kan automatiserade övervakningssystem flagga potentiella överträdelser för granskning.
Inom parkeringsanläggningar hjälper fordonsklassificeringsdata operatörer att förstå hur fordon av varierande storlek påverkar kapacitet och trafikflödeseffektivitet. I takt med att stadsfordonsflottor blir allt mer mångsidiga – allt från kompakta elfordon till stora lastbilar – blir denna information allt mer kritisk för anläggningsplanering.
Viktigt är att dessa analyser förlitar sig på tredimensionella egenskaper snarare än visuell igenkänning. Systemet kan identifiera ett objekt som har dimensioner och form av en skåpbil eller lastbil utan att behöva läsa registreringsskyltar eller fånga visuella detaljer.
Parkeringsbranschen går gradvis över från statisk infrastruktur till dynamisk, datadriven förvaltning. Denna övergång kräver att olika konkurrerande krav balanseras – inklusive privata fordon, godstransporter, delade mobilitetstjänster och utnyttjande av offentliga utrymmen – inom den begränsade kapaciteten av trottoarkanter och parkeringsplatser.
När städer fortsätter att ompröva parkeringens roll inom det bredare transportekosystemet, kommer tekniker som kan leverera exakta, integritetsmedvetna data att spela en allt viktigare roll. LiDAR växer snabbt fram som ett nyckelverktyg som gör det möjligt för operatörer att se parkeringsinfrastrukturen genom en ny lins inom sina parkeringshanteringssystem.



